TOP
ど素人製作所

| ETロボコン
ロボット2世代 |
日々,つれづれなるままに。
2012/07/09(月)
例のごとく、この時期限りの更新?&開催案内~。
「関LEGO」大会を
今年も実施します。6年目くらいなのでしょうかね…
参加、ご検討願いまっす。
2011/07/25(月)
大会が終了しました。参加した皆様,お疲れさまです。
大会結果を
まとめました。
次は地区大会。上位を目指して下さい!
2011/07/20(水)
大会参加チームを
公開しました。
大会7月23日です。頑張りましょう!
2011/07/3(日)
例のごとく、開催案内~。
通称「関LEGO」大会を
今年も実施します。
参加希望有りましたら,是非とも連絡お願いします!
2011/07/02(土)
充電電池を評価してみる(その4:電池評価->評価判断)
期間が空いている間に充電池は使わないという結論になりました。
つーことで、ここに書かれているネタはあくまで参考データでございます。
とりあえず、残りの情報として記載する内容は「評価判断」です。
【解析結果まとめ】
・充電式EVOLTA(無印)と充電式EVOLTA-eでは充電式EVOLTA(無印)圧勝。
※電池容量の差ですかね。
・電池持ち時間は充電式EVOLTA(無印)文句無し。継続走行も文句無し。
・開始30分の電圧は、アルカリと充電式EVOLTA(無印)で
0.5~0.7V程度の差になる(新品アルカリEVOLTAなら更に差が出るかも)
【評価コメント】
・充電式EVOLTA(無印)で、開始30分7.8Vくらいまでキープできます。
走行には問題が無い為、競技に使っても問題は無いはずです。
・(感想)ただし、「あと一本電池があれば!」感はあります。
⇒実際、もう1本あった場合における電圧計算値が、よさげな値を示します。
初期電圧 :約8.2V(6本)⇒9.6V(7本)
開始5分電圧 :約8.0V(6本)⇒9.3V(7本)
開始30分電圧:約7.7V(6本)⇒9.0V(7本)
※7本の電圧は、電圧値÷6×7で計算した値です。
・(感想)電圧が低いため、パワー/速度共に最高速レベルで不足するはずです。
コメントとしては「多少もの足りなさ」が現れるかも、という意見。
難所の調整(坂道の角度、階段なら1段の高さとか)は
電圧が低いことを想定して行ったほうが良いです。
【で、競技に使えるの?】
・「競技にも使用可能」と判断します。充電式EVOLTA(無印)推奨。
・で、今年は使い切りEVOLTAになりましたので、推奨は「7本で使用する」ですね。
【その他コメント】
・なお、電池がなくなってから満タンまで充電時間は以下となります。
充電式EVOLTA(無印)⇒8時間程度
充電式EVOLTA-e⇒4時間程度
※当然のように、電池容量に比例しています。
2011/04/08(金)
充電電池を評価してみる(その3:電池評価->評価結果)
ちょっと期間の空いた結果編でございます。
【結果】
以下、3つを展開しておきます。
全て、クリックで大きな画像へ。
1.NXT走行時における電圧変化(ALL)
⇒走行体が転ぶまで(電圧が7Vを切るくらいまで)走行させた結果
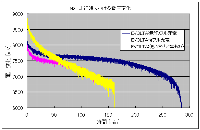
| 結果その1。時間長め。 |
2.NXT走行時における電圧変化(開始30分)
⇒同一の結果を、開始30分のみPickUpしたもの
※「通常の練習/試走会」を想定した電圧レベルです。
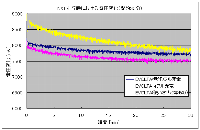
| 結果その2。時間30分。 |
3.NXT走行時における電圧変化(開始5分)
⇒同一の結果を、開始5分のみPickUpしたもの
※「大会本番」を想定した電圧レベルです。

| 結果その3。時間5分。 |
【各電池評価】
充電式EVOLTA(無印)
初期電圧 :約8.2V
開始5分電圧 :約8.0V
開始30分電圧:約7.7V
電池持ち時間:約250分
充電式EVOLTA-e
初期電圧 :約8.1V
開始5分電圧 :約7.7V
開始30分電圧:約7.5V
電池持ち時間:約120分
アルカリEVOLTA:2年放置もの新品
初期電圧 :約9.0V
開始5分電圧 :約8.5V
開始30分電圧:約7.8V
電池持ち時間:約120分
※電池持ち時間は、「7V以下の電圧に達するまでの時間」で判断
続きます。
2011/04/02(土)
充電電池を評価してみる(その2:電池評価->評価方法)
続けて充電池を評価してみます。
ひたすら動かすだけの簡単なお仕事です。
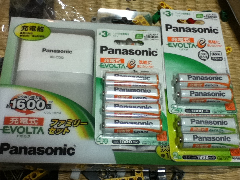
【使用した電池】
・充電式EVOLTA(無印):フル充電
・充電式EVOLTA-e:フル充電
・アルカリEVOLTA:2年放置もの新品(ウチに眠っていた)
こいつらです↓。

| 使用した電池たち |
【確認方法】
・半径60cmの円(サンプルコース上)を「なんちゃってPID制御」有り、
「前進速度=40」でひたすら走行+BlueTooth通信させて電圧チェック。

| 試験中様子 |
続きます。次は結果!
2011/03/31(木)
充電電池を評価してみる(その1:環境準備)
世の中、節電の流れが大きくなっております。
ETロボコンもその流れに乗るべきでしょう、ということで
大量に電池を使うという流れを変えるべく「充電電池」なるものを
使う可能性を検討することになりました。
で、とりあえず電池買ってみる。
購入したのは、充電式EVOLTAと充電式EVOLTA-eでございます。
| 充電式EVOLTAとEVOLTA-e |
そして、とりあえずNXT組み立ててみる、2台。
モータ/センサケーブルとして、20cm長さのケーブルが3~4本あると便利です。
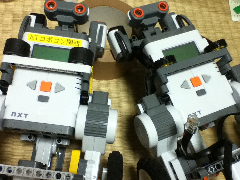
| 作ったNXT走行体×2 |
…さて、今までNXTのプログラムをまともに作ってなかったので
いまさらながら環境構築とプログラムを作ることに。
※それで技術委員としてモデル審査していたのか!
という文句は聞こえません(∩゜д゜)
プログラム作業として以下のタスクを実施。
・2台分のNXTを作る
・開発環境を構築
・サンプルプログラムを動かす
⇒怪しげな動きをするモーターのせいで時間が…
・なんちゃってPID制御を組み込む
・Bluetoothの通信を試す
⇒通信初期に実施する手順を間違っていたので、
無駄に時間がかかってしまいました
(*1:詳しく知りたい人は下記を参照)
・Bluetoothでログを出力する機能を組み込む
・ついでにリファクタリング
ということで、開発環境が完成しましたとさ。
| 開発環境(NXTとTelnet環境) |
*1:Bluetooth通信で嵌っていたこと。
ETロボコンのサンプルプログラムでは、
Bluetoothの認識、接続開始を行うためには
NXTを起動画面(下記の画面)の状態で実施する必要があります。
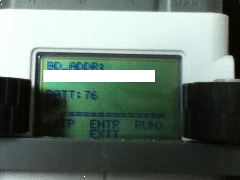
| この画面でBluetooth認識なり |
この画面でBluetoothを認識しないと、上手くいきません。
僕は、プログラムRUN後に認識させようとして失敗していました。
ちゃんと手順が記載されておりますので、手順はちゃんと読みましょう♪
続きます。
2011/03/4-2(金)
ET実施説明会やったよ~。
ETロボコンの実施説明会@関西を2/27に実施しました。
参加者は19名。宣伝してなかったからでしょうか,今年は少なめ。
なお,半数がリピータ,半数が初参加という割合でした。
内容としては,以下のような感じになります。
・ETロボコン概要,競技内容の説明
・技術情報紹介(走行体,開発環境)
・デモ走行タイム
・ETロボコンの価値,モデル開発と審査,審査方法について
・技術教育について
・参加申込方法紹介
・地区大会年間スケジュールについて
で,僕はサンプルプログラムが動かないのでデバッグしてましたとさ。

| 実施説明会風景 |

| 2011年NXT走行体 |
あつーい説明と,質疑応答が行われました~。
2011/03/4-1(金)
問題はこうだったよ~。
さて,実施説明会中に,サンプルプログラムなのに…どうして…?
という状況で,デバッグ確認してました。
とりあえず,直立停止のみを行うプログラムにしてみる。
⇒以下のような動きをしていました。
・なんというか,動きがキビキビしていない。
・ジャイロを用いた制御周期が遅いような気がする
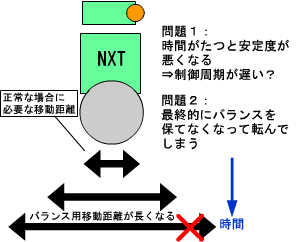
| こんな動き |
で,少しずつ調査を行った結果,左足側のモータ交換で正常な動作へ。
ということで,以下の原因推測をしてみました。
【原因推測】
NXT本体⇒モータ間の通信において,同期的な制御を行っていると推測すると
モータからの応答が遅くなった場合に,全体の処理が鈍くなってしまう可能性がある。
例えば,モータからの応答が通常1ms以下のものが,5ms程度になると
サンプルプログラムに入っている4msのSleepと合わせて制御周期は9msになる。
制御周期が長くなってしまうため,上記のような動作になるのかも…?
ということで,同じような現象に出会う人はとても少ないと思いますが,
「単純な直立停止」のプログラムで上記のような動きをした場合には
モータの交換を試してもらうと良いかなと思います。
※ちなみに,調べてみるとI2C通信を行っている様子。
遅いってのはありえるのかなぁ?検証だけはしておこうかな。
ついでに,今回の問題解決までの思考の流れをブログにアップしてみました。
2011/03/2(水)
宣言した通り,頑張って日誌更新する。
先週日曜日は,ETロボコン実施説明会@関西でした。
…ですが,その話の前に前日からの状況。
よくあることですが,実施説明会前日に機体を作っていました。
LEGOパーツが見つからない中,深夜までかかって完成。
開発環境は当日朝に構築して,現場調整で走らせようと想定していました。
…が,残念ながら上手く走らない。単なる倒立をさせようとしても安定しない。
今年1発目からデバッグでしたとさ…。
ちなみに動いたのは実施説明会も終了した夜でした。
なお,問題点については次回説明します。
2011/02/25(土)
たまには夏以外にも更新してみる。

| ETロボコン実行委員日誌 |
出来る限り,とあるETロボコン実行委員のログを残してみようかなと思いました。
忙しくならなければ,1年間更新してみたいです。
ちなみに,「とあるさくらのジェネレータ」を
使わせていただきました。

ど素人製作所 サイト管理人:みずの
詳しくは profileで。どうやらIE推奨のようです。
メールアドレス: 
間違っている部分は非常に多いはずですので,
気付いたら容赦なく指摘してください. |

