本ページでは,競技規約を「ETロボコン」準拠としました, 「LEGOロボット競技関西大会」の概要及び参加申し込み方法を記載します。 ※大会は終了しました。 上のページへ戻る
「LEGOロボット競技関西大会」は以下の日程,場所にて開催しました。 場所: 伊丹市ラスタホール(「エントランスホール」で行います) 阪急 … 「稲野」駅より徒歩10分くらい。 JR … 「猪名寺」駅より徒歩25分くらい。 日程:9月17日(日) 費用:1000円/チーム (ゴースト大会のみの参加は無料です) 会場につきましては,光センサの関係で十分な事前情報が 必要と思います。そのため,詳細に関して, 会場詳細に現在判明している 情報をまとめております。そちらでご確認お願いします。 不明点あれば,メールでmizu-nori@amateur-factory.jpまで 指摘頂ければと思います。 (直接会場への問い合わせはご遠慮願います) 概要へ戻る
参加方法は,メールにて以下のフォームの内容を沿えて, メールアドレス:mizu-nori@amateur-factory.jp へと,8月22日までご連絡ください。 なお,ゴースト大会に関しては,データ送付期限を9月10日とします。 申し込みとデータ送付期限は異なりますので注意してください。 (大会は終了しました。申し込みも期限切れです) ・通常大会参加申し込みフォームへ ・ゴースト大会申し込みフォームへ なお,ETロボコンに参加したチームでは無くてもOKです。 別途新人チームの教育等で新チームを作って参加も大歓迎です。 当日参加チームには,ポスターセッション向けの資料も用意頂きたく お願いします。(無しでも参加可能です。) なお,大会当日は,参加費用として1チーム1000円頂きます。 会場代などの必要経費に当てさせて頂きますm(_ _)m すみませんが当日は昼食等も各自準備願います。 ※申し込みフォーム(競技大会参加用)---------- (大会は終了しました。申し込みも期限切れです) 件名:LEGOロボット関西競技大会参加希望(チーム名) 以下を本文に記載ください。 1.チーム名:○○○ 2.チーム代表者名:○○○ 3.連絡先メールアドレス1:○○○ 連絡先メールアドレス2:○○○ 4.参加者名1(代表者名):○○○ 参加者名2:○○○ 参加者名… (参加者は,当日参加するメンバー全て記載願います。) 5.持ち込みモデル有り・無し (ここに記載 のポスターセッション用の持込有無を記載下さい) 6.懇親会参加・不参加 (当日は懇親会も予定しております。費用は4000円程度の予定です。) 7.その他コメント(要望等あればお願いします) ・複数チームの登録は,それぞれ別のメールにてお願いします。 ・連絡先メールアドレスは別途メーリングリストに 登録させていただきます。 メーリングリストは,大会の連絡及び情報交換用に使用する予定です。 ・登録アドレスは,1チームで2つのアドレスまででお願いします。 ------------------------------ なお,ゴースト大会申し込みは以下のフォームにてお願いします。 ※申し込みフォーム(ゴースト大会参加用)---------- (大会は終了しました。申し込みも期限切れです) 件名:LEGOロボット関西競技大会ゴースト大会参加希望(チーム名) 以下本文に記載ください。 チーム名:○○○ チーム代表者名:○○○ 連絡先メールアドレス1:○○○ 連絡先メールアドレス2:○○○ 参加者名(代表者名):○○○ タッチセンサ使用有無(パーツ変更が必要か否か) その他コメント ※別途メールにて9月10日までに添付ファイルに「main.lx」と 「使用方法を記載したテキストファイル」 を添えて連絡お願いします。 ------------------------------ 概要へ戻る
本大会は,ETロボコンチャンピオンシップ出場チームへの練習会並びに, 7月の本大会にて失敗したチームのリベンジ大会を中心としております。 また,技術的交流の場とすることも目的としてますので, ETロボコンに参加していないチームも気軽に参加ください。 来場出来なくても,競技参加できる「ゴースト大会」等も行いますので, そちらも参加検討して頂ければと考えております。 以下,競技会で行う内容です。 ・LEGOロボット競技会 ・上位入賞者の「ココが良かった!」発表 ・ポスターセッション ・ゴースト大会 LEGOロボット競技会---------- ETロボコンの競技規約に準拠したロボット競技会です。 競技会の規約等は,ETロボコンの ページにて確認お願いします。 当日のコースはETロボコン本番コースとは微妙に異なることはご了承願います。 なお,当日は試走時間を3時間程度用意します。 十分な調整で実力を発揮して頑張りましょう! 競技会のルールに関しては,競技会ルールにてご確認ください。 上位入賞者の「ココが良かった!」発表---------- 当日は,上位(1位~3位)に入賞したチームに「ここがウチのチームのポイント」という 発表をして頂こうと考えています。(発表時間は10分程度) ・モデルに記載されている内容で良かった点 ・モデルに記載されていないけど,こんなのを用意していたのが良かった,という点 ・当日にこれをやったのが決め手だった などの本音トークを期待してしています。 なお,ETロボコンチャンピオンシップに出るチームは,企業秘密もあると 思いますので,黙秘権を行使してもよろしいです。 ポスターセッション---------- 試走時間中の技術的な交流及び親睦を目的として, 「ポスターセッション」を予定しています。 各チームに「ETロボコン」参加時に作成したモデルを用意してもらい, 各チームのピットの近くにパネルを用意して張っておきます。 試走会中は他のチームのモデルに自由に質問可能とします。 「この機能はプログラムに入っているのですかー?」や 「これってどのくらい効果ありました?」などの厳しい質問を通して, 技術的なレベルアップに役立ててみましょう! なお,参加チームは当日貼り出し用のモデルをご用意していただきたく思います。 内容はETロボコン参加時のままでも,変更して頂いても構いません。 準備のほどよろしくお願いします。(A4/A3/モノクロ/カラーどちらでも構いません) 最大枚数は,A3サイズの6枚として下さい。 ※必須ではありません。モデル無しでも,参加は可能としております。 ゴースト大会---------- 遠方により参加できないチーム向けに,「ゴースト大会」を用意しました。 「安定性」と「使いやすさ」を高レベルで競う大会となるかと考えています。 「main.lx」と「使用方法」のみ送って貰い,全く同じ走行体に ダウンロードしてして走行を競う大会を予定しています。 → 安定性や使用が容易いキャリブレーション機能が必須です。 参加チームは,当日競技会内での走行を行います。 イン・アウト両方走行しますので,切替機能の具備もお願いします。 「インのみ希望」などであれば,その旨を追記して連絡お願いします。 極力新品電池での走行を行いたく考えていますが, 「電池入れてすぐの状態でスタートして下さい」等の要望には 対応が厳しいため,多少の電圧変化には耐えうるモジュールの準備願います。 その他詳細ルールに関しては,ゴースト大会ルール にてご確認ください。 結果は, ・全体での走行順位 ・ゴーストのみでの走行順位 を,本ページにて発表しますので期待してお待ちください。 参加希望者は申込みフォームを確認の上, ファイル添付して参加希望連絡をお願いします。 概要へ戻る
競技会およびゴースト大会のルールについて記載します。 多少の変動は生じるはずですので,随時更新を予定しています。 ・競技会ルール ・ゴースト大会ルール 競技会ルール---------- ・試走会中は自由に走行可能です。 試走会中は,自由にセンサ値の確認および走行を行って構いません。 他のチームを邪魔しない程度に声をかけながら調整お願いします。 試走会中はポスターセッションを同時開催しております, 他のチームの走りを見ながら活発な討論などを行って頂ければと思います。 ・競技規約はETロボコンの内容です。 競技内容は,ETロボコンで行っている内容と同じとします。 IN/OUTの両方を走り,その走行ポイントを競うという方針にします。 ・車検は行いません。 当日は特に車検は行いません。 ローカル大会なので,改造車も一応問題無しとしますが, あまりにかけ離れていた場合は「オープン参加」として,順位は別扱いとします。 ・電池は特に規程しておきません。 電池に関しても特に規程は行いません。 最強(1.7V)電池の「オキシライド」を使用してもOKです。 ローカル最速を求めても良いです。 ・本番中のセンサ値調整に関して 本番走行前には,1分程度自由調整時間を用意します。 この時間中は,走行チームの邪魔しない程度で, 他のチームもセンサ値確認を行っても構いません。 ただし,邪魔するとペナルティー(走行に時間追加)としますので注意ください。 ・カッコよく! (読み飛ばしても結構です) 折角なので「○○行きます!」等の威勢の良い発言で, 皆の注目を浴びた状態でカッコよく決めてやってください。 盛り上げる発言は大歓迎です。 ゴースト大会ルール---------- ・「main.lx」と,「プログラム起動後の使用方法」のみメールで送付ください。 申し込み時に,「main.lx」と「プログラム起動後の使用方法」を テキストファイルに記載した方式で,送付ください。 本番時は,記載された内容に従って走行を行います。 (出来る限りわかりやすく記載願います) ・INとOUTは別プログラムでも構いません。 INとOUTのプログラムは,別のプログラムとしても構いません。 走行前に,プログラムをダウンロードして走行開始します。 ・使用する走行体は「全て同一」のものです。 使用する走行体は,「あまがさきつうしんぶ」の持つ標準な走行体です。 バージョンはRCX2.0です。BrickOSバージョンは0.9.0です。 ・走行体のセンサポート/モータポート/タッチセンサ使用有無に関して。 走行体のセンサポートとモータ用のポートについては, 当日の進行をスムーズとするため,統一させてください。 走行体の詳細は,こちらを参照としてください。 タッチセンサに関しては,使用の有無によって光センサ部分の パーツを取り替えることで対応できるようにしようかと考えています。 ・競技ルールは通常の競技会と一緒です。 競技ルールとしては,通常の競技会と同じ内容とします。 走行前に走行担当者が,使用方法を確認しながら閾値を決定します。 ハードコーディングでのセンサの閾値決定は厳しいかと思います。 ・電池はSONY STAMINA EXのほぼ満タン状態で走行します。 使用する電池は,SONY STAMINA EXです。 出来る限り電池MAXの状態で走行させたく考えていますが, 全てのゴーストに対して満タン状態は不可能です。 多少の電圧変動と,満タン状態が不可能であることはご了承願います。 ・閾値の判断は,自動判定機能が無い場合は走行担当者の判断で決めます。 閾値は,自動判定機能などが無い場合は,走行担当者が 各自の判断で値を入力します。ご了承願います。 ・あまりに操作方法が難しい場合は,断念の可能性があります。 操作方法が昔のファミコン裏技以上に難しい場合は, 進行の関係上断念してしまう可能性があります。 使用方法は極力簡易に+説明をわかりやすくお願いします。 概要へ戻る
以下を予定しています。 10:00~10:30 受付 10:30~14:00 試走会及びポスターセッション 14:00~16:00 競技会(ゴースト大会含む) 16:00~16:45 表彰式 及び ココが良かった!発表および討論 17:30~ 懇親会 昼食は試走会中に各自でお願いします。 ・受付時間:10時からで,コースが準備された状態であれば すぐ走行練習を行って頂いて構いません。 ・目安として,10時半に開催宣言及び簡単な注意事項等説明します。 なお,競技会は1チーム3分(準備1分+走行2分)で 時間作成しております。 大体の目処は以下のイメージです。(時間はオフセット表示で) ・0:00…1チーム目準備 ・0:01…1チーム目走行 ・0:03…2チーム目準備 … また,5チーム程度を目処に5~8分程度の休憩を行います。 この時間を利用して,光環境の確認なども可能としますので, 走行前の最終準備として役立てていただきたく思います。 なお,短時間でゴールするチームが続出の場合, その分の時間を短縮して運営を進める予定です。 空いた時間で,討論会の充実やデモンストレーション時間の 追加などを考えております。 概要へ戻る
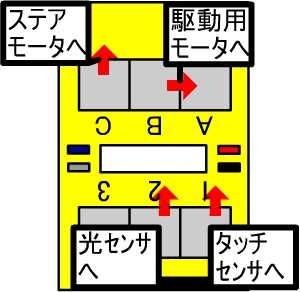
参加者の皆様が「知りたいだろう」と思った情報をまとめておきます。 質問等があった場合,この部分に回答などを追記する予定です。 ・会場情報(現状を見ての感想レベル) ・灰色設定方法 ・ゴースト大会用マシン詳細 会場情報---------- 会場情報を更新しました(8月7日)。 会場の写真です。明るさまではちょっと写真では判りづらいですが, 以下のような感じです。