|
|
ロボットの解析ETロボコンでは,使用ロボットが決まっています。
このロボットは,駆動用のモータと,ステアリング用のモータをひとつずつ持ちます。 駆動用のモータには,デフ(ディファレンシャル)が入っていて, かなりのコーナーにおける左右輪の回転差にも対応可能です。 ただし,デフにより駆動トルクがかなり減らされており, 坂道などはモーターパワーをそれなりに大きくしなければ,対応できないです。
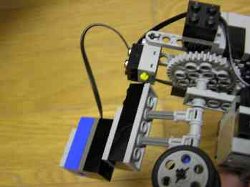
次に,センサー。2つのセンサーを持ちます。 1つ目は光センサー。ライントレースをするための, 「白」と「黒」+「α(別の色も判定可能)」の判定を行います。 ライントレースには最も重要で,この値の判別が勝利を分けるものと思います。 解析は特別に他のレポートで行っています。 もうひとつのセンサーはタッチセンサー。 名前のとおり,単なるスイッチで,ON/OFFを判定できる品物です。 図のような位置についていて,ステアリングが直線を向いているときに 「ON」,ステアがきられているときは「OFF」となります。
特に,これら2つのセンサーの使用方法と,ステアリングの制御方法が 勝負の分け目のようですね。 微妙に追記事項。気付いた人はラッキー? 光センサーは,外乱にめちゃくちゃ弱いです。 外乱に強くする仕組みが必須です。また,漆黒線という, 通常の黒よりセンサーの値が,「より黒」を判定する必要がありますが, 外乱のある状況では判定は難しい(値として厳しい)のではないかと考えられます。 「黒」と「白」の判定のみで勝負する方法を考える方が勝利へは近いかもしれません。 また,タッチセンサーも,機構的な関係上, ONを判定する設定とするのがかなり厳しいです。 ステアリングを大きく振ると,センサに引っかかってしまうとかが生じます。 光センサーの「黒/白」判定のみで,まずチャレンジするのが無難かもしれません。 |